Unmanned maritime vehicles are becoming important assets for military operations, not only on the battlefield, but also in logistics and in supportive roles. This also means that more and more of these vehicles are being deployed in the field, each with their own characteristics. This variety poses interoperability problems when deploying these assets together for operations, as there are to date no standardized data interchange platforms that allow for an easy transfer of sensory information from one platform to another. This study aims to remedy that situation by developing an interoperability concept for heterogeneous unmanned assets.
As a key concept, we develop a heterogeneous interoperability and collaboration framework which is seamlessly interoperable with the existing and future C4I and GIS infrastructure. The interoperability concept consists of a highly modular system of carrier platforms and sensor payloads, enabling straightforward switching of payloads from one system to another.

In terms of validation, three use cases are under preparation to validate the proposed interoperability concept in a wide range of applications:
- Shared situational awareness and data traffic management for unmanned dredging vessels
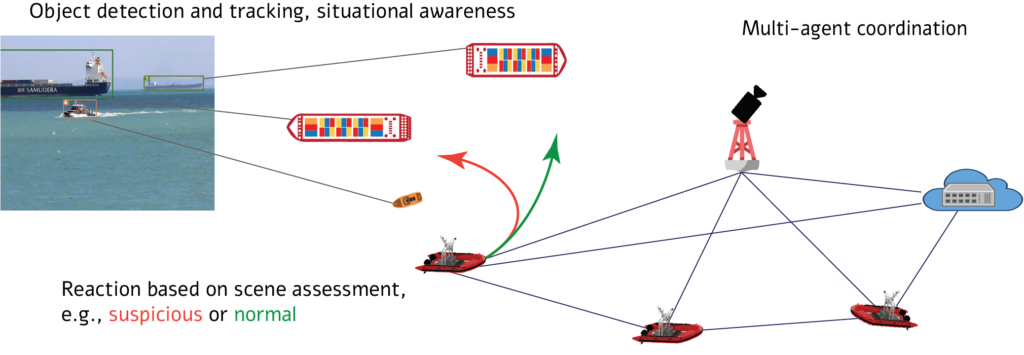
This is fits in a VLAIO – Blue Cluster research and innovation project (SSAVE) studying the data management, cybersecurity and interoperability questions that are posed when (unmanned) assets start to exchange data on all levels (not only towards the cloud, but also between the edges). - Maritime surveillance of offshore windmill parks
Within the scope of this validation use-case an off-shore windmill park has been outfitted with technology (hardware and software) to automatically detect trespassing vessels. - Unmanned mine counter measures
This validation use case fits into the much larger PESCO-MAS-MCM framework and is still under preparation.
We train our detection algorithm using a digital twin in Unreal Engine, the creation of which is done with an automated procedure.

Funded by the Royal Higher Institute for Defence, with support from dotOcean and the Belgian Navy.
2019 – 2023
0.8 M€

Joint effort between MWMW and MECA/RAS.
Publications
2021
- G. De Cubber, R. Lahouli, D. Doroftei, and R. Haelterman, “Distributed coverage optimisation for a fleet of unmanned maritime systems,” ACTA IMEKO, vol. 10, iss. 3, pp. 36-43, 2021. [PDF]
2020
- G. De Cubber, R. Lahouli, D. Doroftei, and R. Haelterman, “Distributed coverage optimization for a fleet of unmanned maritime systems for a maritime patrol and surveillance application,” in ISMCR 2020: 23rd International Symposium on Measurement and Control in Robotics, Budapest, Hungary, 2020. [PDF]
2019
- G. De Cubber, “Opportunities and threats posed by new technologies,” in SciFi-IT, Ghent, Belgium, 2019. [PDF]
- G. De Cubber and R. Haelterman, “Optimized distributed scheduling for a fleet of heterogeneous unmanned maritime systems,” in 2019 IEEE International Symposium on Measurement and Control in Robotics (ISMCR), Houston, USA, 2019. [PDF]
External links
Inspirational Blue Wave-award (Blue Innovation Awards 2021)
Expeditie Noordzee met Koen Geirnaert (dotOcean): ‘Een robot wordt niet zeeziek’ (Podcast, De Tijd)
Robots veroveren de Noordzee (De Tijd, 01/06/2021)
Belgische Noordzee wordt proeftuin voor autonome en onbemande vaartuigen (Het Nieuwsblad, 22/06/2021)